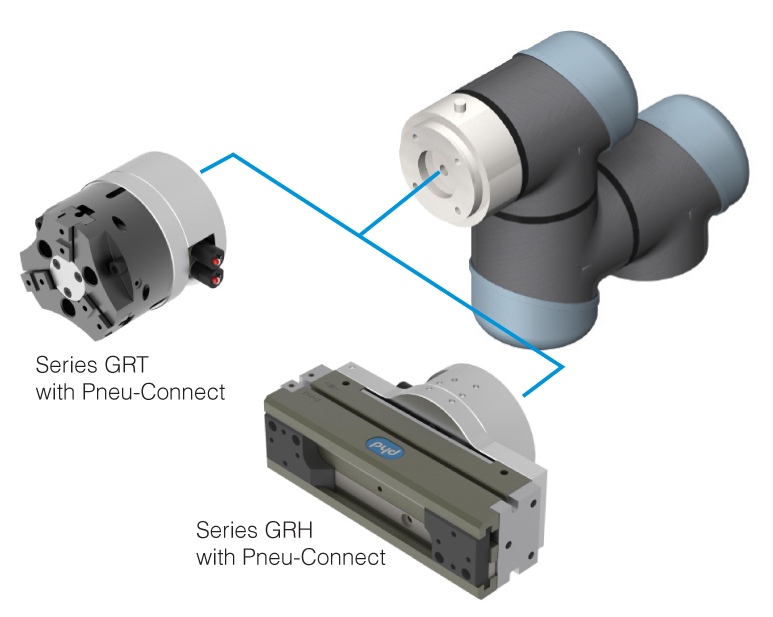
PHD Pneu-Connect™ provides seamless pneumatic end-effector integration to collaborative robots. The illustration shown demonstrates robot adaptation to PHD concentric and parallel grippers. Employing built-in MAC® valves, Pneu-Connect™ connects directly to the robot arm tool port enabling pneumatic gripping capability.
The Pneu-Connect package provides a cost-effective solution for your collaborative robot application. Click to find out more about PHD.